
Робототехнические задачи удаленной манипуляции механическими объектами из космических давно перешли к земным. Например, уже выпускается беспилотный КАМАЗ-6559 (Юпитер 30). Ростсельмаш запускает производство беспилотных комбайнов на базе TORUM 785, на очереди беспилотные надводные и подводные аппараты, не говоря уже о ра-боте в агрессивных средах [1]. Все аппараты такого класса оснащены множеством разнообразных датчиков. Вся их совокупность заменяет живого пилота, у которого есть только один основной тип датчика – зрение – и один вспомогательный – слух (лучше один раз увидеть, чем сто раз услышать). Их человеку достаточно для решения любых самых сложных про-блем навигации. Очевидно, что и в робототехнике дальнейшее развитие будет тесно связано с 3D-зрением, что естественно перекликается с задачами голографии, особенно с современной цифровой и компьютерной голографией. Анализу одного из путей современного развития цифровой голографии, а именно передаче голографической объемной информации об окружающем пространстве от местоположения искусственного аппарата к оператору, удаленно осуществляющему контроль и функции управления, посвящена настоящая статья.
Предпросмотр статьи
Идентификаторы и классификаторы
Огромная информационная емкость голограмм встала на пути создания голографического цифрового видео и 3D дополненной реальности. Традиционные методы сжатия, успешно работающие для двумерного видеоряда, как, например, MPEG-4, уже не справляются с голографическим видеорядом. Причина этого в том, что классическое математическое энтропийное сжатие позволяет сжать видеоряд не более чем на два порядка [2], а для передачи голографического 3D-изображения требуется сжать на пять-шесть порядков. Действительно, плотность записи информации на голограмме ограничивается размером пятна Эйри и для изобразительных голограмм достигает величин порядка 106 байт/мм2.
Список литературы
1. Локощенко А. М., Фомин Л. В. Моделирование процессов взаимодействия агрессивной среды с материалами и элементами конструкций // Научное обозрение. Реферативный журнал. – 2018. – № 1. – С. 11–24. – URL: https://abstract.science-review.ru/ru/article/view?id=1856
2. Lucente M. The first 20 years of holographic video – and the next 20 // SMPTE 2nd annual international conference on stereoscopic 3D for media and entertainment – Society of Motion Picture and Television Engineers (SMPTE), 2011
3. Титарь В. П., Богданова Т. В. Проблемы создания голографической телевизионной системы // Радиоэлектроника и информатика. – 1999. – № 2 (7). – С. 38–42.
4. Денисюк Ю. Н. Достаточно ли известны фундаментальные принципы голографии для создания новых типов объёмного кинематографа и искусственного интеллекта? // Журнал технической физики. – 1991. – Т. 61 (8). – С. 149–161.
5. Shoidin S. A., Pazoev A. L. Compressing 3D holographic information similar to data trans-mission via a single sideband // Journal of Optical Technology. – 2022. – Vol. 89 (3). – P. 176–182. – DOI: 10.1364/JOT.89.000176.
6. Takeda M. Fourier fringe analysis and its application to metrology of extreme physical phenomena: a review (invited) // Applied Optics. – 2013. – Vol. 52 (1). – P. 20–29. – DOI: 10.1364/AO.52.000020.
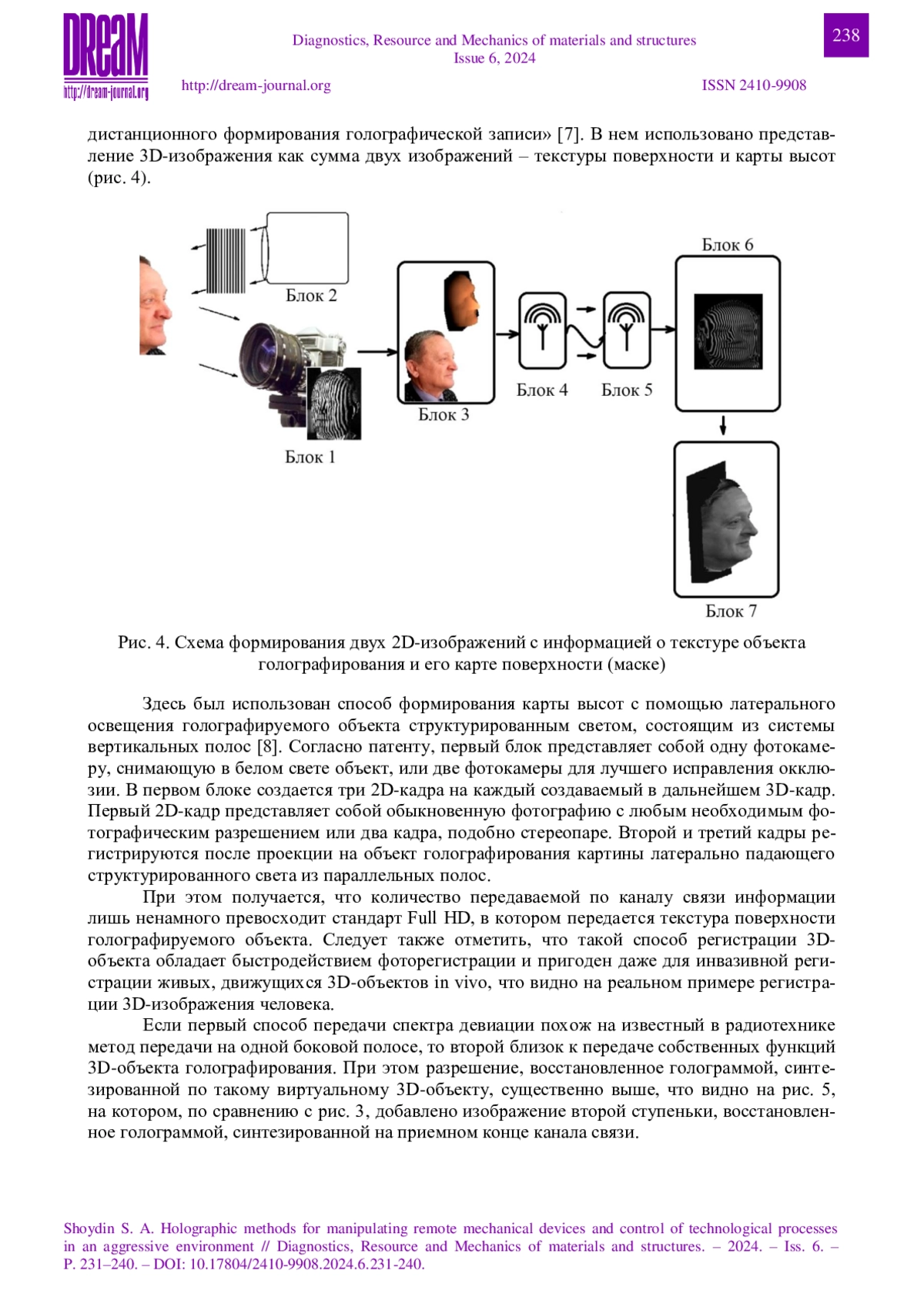
7. Патент RU2707582C1 Рос. Федерация. Способ дистанционного формирования голографической записи : № 2018124440 : заявл. 03.07.2018 : опубл. 28.11.2019 / Шойдин С. А. – 19 с.
8. Shoidin S. A., Pazoev A. L. Remote formation of holographic record // Optoelectronics, Instru-mentation and Data Processing. – 2021. – Vol. 57 (1). – P. 80–88. – DOI: 10.3103/S8756699021010118.
9. Пазоев А. Л., Шойдин С. А. Передача 3D-голографической информации по радиоканалу методом, близким к SSB // Научно-технический вестник информационных технологий, механики и оптики. – 2023. – No. 23 (1). – C. 21–27. – DOI: 10.17586/2226-1494-2023-23-1-21-27.
Выпуск

Другие статьи выпуска

Представлено теоретическое и экспериментальное обоснование новой ширографии, по чувствительности и пространственному разрешению на два порядка превосходящей ранее известный вариант, и рассмотрены некоторые ее применения. Кроме того, в ней отсутствуют такие негативные свойства старой ширографии, как малый контраст полос корреляции и их исчезновение при малейшем поступательном перемещении объекта диагностики. Показано, что физической основой метода является новый механо-оптический эффект, благодаря которому сдвиговая интерференция волн реализуется спонтанно, без использования специальной оптики. Приведены формулы, связывающие параметры, характеризующие поступательное перемещение объекта, среднее значение, дисперсию, временную автокорреляционную и спектральную функцию деформаций объекта, с параметрами динамики спеклов в плоскости его изображения. Указанные формулы найдены как для рассеивающей свет поверхности, так и для прозрачного объекта, расположенного вблизи случайно-фазового экрана. Установлено, что если разность оптических путей Δu двух волн равна сумме М независимых величин Δum, то появляется возможность определить вышеуказанные параметры, соответствующие слага-емым Δum, m = 1, 2, … M. Приведены результаты применения теории для изучения следующих явлений: необратимых процессов, вызванных усталостью материалов; внутриклеточных процессов в живых культивированных клетках; турбулентных потоков. Рассмотрены механизмы усталостной деградации ряда материалов, выявленные новым методом. Количественно оценены уменьшение активности клеток при введении в питательный раствор трех токсичных веществ и относительный вклад вихрей с разными временами релаксации в турбулентное течение воздуха.

В статье рассматривается класс точных решений для описания медленных течений Стокса бинарных жидкостей. Семейство точных решений построено на основе анзаца Линя – Сидорова – Аристова для поля скорости. Поле скорости обладает широким функциональным произволом. Оно зависит линейно от двух координат (горизонтальных или продольных). Коэффициенты линейных форм являются функциями двух переменных от третьей (вертикальной или поперечной) координаты и времени. Поле давления, поле температуры и поле концентрации растворенного вещества являются квадратичными формами. Иными словами, учитываются не только горизонтальные градиенты, но и кривизна гидродинамических полей. Построенное точное решение описывает термодиффузию с обоими перекрестными диссипативными эффектами Соре и Дюфура. Выведена система уравнений для описания неустановившихся потоков, состоящая из уравнений типа теплопроводности и градиентных уравнений. Приведены формулы гидродинамических полей для описания установившегося медленного течения Стокса бинарной жидкости.

В статье доказана эффективность обработки трением с перемешиванием околошовной зоны сварного соединения стали 09Г2С твердосплавным инструментом со сферическим наконечником радиусом 10 мм с нормальной силой 3000 Н, частотой вращения 2500 об/мин и подачами 50, 75 и 100 мм/мин. В процессе обработки смешанная структура верхнего бейнита, видманштеттова феррита и зерен феррита изменяется на глобулярную феррито-перлитную структуру при измельчении зерна в зоне перемешивания до 96 %. Продемонстрировано практическое применение обработки трением с перемешиванием инструментом со сферическим наконечником для упрочнения околошовной зоны сварного соединения стали 09Г2С. В результате обработки пределы текучести и прочности повысились на 15,5 и 23,3 % соответственно, относительное удлинение увеличилось на 78,6 %, максимальный зафиксированный средний прирост микротвердости составил 171 %.

Методом позитронной аннигиляционной спектроскопии было исследовано поведение дефектов в процессе облучения в реальной структуре железоникелевых сплавов, которые являются модельными для аустенитных нержавеющих сталей, используемых в ядерных реакторах на быстрых нейтронах. Рассмотрены вопросы эффективности поглощения точечных дефектов (междоузельных атомов и вакансий) дислокациями (дислокационный байес), как главной причины возникновения вакансионного пересыщения в сталях, путем закрепления дислокаций надразмерными примесями или выделениями вторых фаз. Такие исследования актуальны в связи с проблемой ограничения широты использования сталей аустенитного класса в конструкционных материалах ядерных реакторов из-за склонности сталей к вакансионному распуханию, обусловленному вакансионным пересыщением. В результате работы было показано, что в холоднодеформированном сплаве Fe–Ni во время облучения происходит накопление вакансий несмотря на высокую плотность дислокаций, что обусловлено дис-локационным байесом. В холоднодеформированном стареющем сплаве Fe–Ni–Ti накопление дефектов во время облучения снижено по сравнению с холоднодеформированным сплавом Fe–Ni. Дислокации, закрепленные преципитатами Ni3Ti, обладают меньшей эффективностью поглощения междоузельных атомов по сравнению со свободными дислокациями в сплаве Fe–Ni. Благодаря этому снижается байес дислокаций и усиливается взаимная рекомбинация точечных дефектов. Полученные в работе данные могут быть использованы при прогнозировании радиационной повреждаемости аустенитных нержавеющих сталей и сплавов, а также при разработке методов улучшения их радиационной стойкости.

Улучшение усталостных и прочностных характеристик конструкционных материалов включает в себя различные методы обработки поверхности. Одним из широко используемых подходов является лазерное ударное упрочнение (ЛУУ), обычно применяемое для обработки поверхностей металлических деталей и конструкций. В данном исследовании рассматривается возможность применения метода ЛУУ к неметаллическим композитным материалам, изготовленным с помощью моделирования методом наплавленного осаждения. В ходе исследования изучаются физические механизмы и фундаментальные принципы ЛУУ, а также его влияние на микроструктуру и механические свойства композитных изделий. Структура композитных образцов до и после ЛУУ была проанализирована с помощью рентгеновской компьютерной микротомографии. Были проведены испытания на растяжение образцов, об-работанных лазерным ударом, и сравнение различных защитных покрытий: алюминиевой фольги, ПВХ-ленты и золотого покрытия. Результаты показали, что механические свойства образцов после ЛУУ независимо от исследованных материалов защитного покрытия незначительно отличались друг от друга и от необработанных образцов.

В настоящей работе рассматриваются микроструктура и механические свойства композитных материалов, полученных по технологиям вакуумной инфузии и прямого прессования препрега, для заданной геометрии образца с добавлением слоев вулканизированного ре-зинового полотна. Композиты, полученные методом прямого прессования, имеют в 2 раза больший модуль упругости при изгибе и в 1,8 раза большую прочность, чем образцы, полученные с помощью вакуумной инфузии. Установлено, что использование резиновых слоев позволяет управлять механическими свойствами композита – значительно снижать модуль упругости при незначительном снижении прочностных показателей. Для композитов, полученных по технологии вакуумной инфузии, удалось снизить модуль в 5,5 раз, а для образцов, полученных методом прямого прессования, – в 4 раза. При использовании обеих технологий предел прочности был снижен в 2 раза.

В работе установлена аналитическая связь между макроскопическими электродинамическими характеристиками и оптическими константами изотропной конденсированной среды. В работе используется язык гиперкомплексной алгебры. Полученное решение обобщается на анизотропный случай.

В настоящей работе рассмотрен многолетний опыт эксплуатации и проблематика работы системы интеллектуального деформационного мониторинга для стальных конструкций покрытия двух блокированных зданий спортивного комплекса с бассейнами. Стальные конструкции ферменного покрытия объекта в процессе возведения и эксплуатации находились под влиянием различных неблагоприятных факторов, которые создали историю формирования сложного деформационного состояния объекта. Организованная в 2012 г. и запущенная в работу несколько позже система интеллектуального деформационного мониторинга вкупе с методами математического моделирования позволила на протяжении многих лет осуществлять контроль деформационного состояния сложного объекта. Однако долгосрочные измерения контрольных параметров сооружения посредством различных датчиков сопряжены с рядом известных проблем. Одна из них – это деградация чувствительных измеритель-ных элементов, в частности тензодатчиков деформации. В работе предложен разработанный сотрудниками ИМСС УрО РАН и опробованный на натурном объекте метод, позволивший выявить и дифференцировать деградирующие измерительные элементы системы мониторинга без нарушения ее работы.

Методом остаточного электросопротивления исследовано радиационно-стимулированное расслоение в облученных 5 МэВ электронами сплавах Fe–34,7ат.%Ni с разными типами стоков для точечных дефектов в виде дислокаций и деформационных вакансионных кластеров. Установлено, что при облучении при температуре около 300 К образуются вакансионные кластеры. Диссоциация этих кластеров при изохронных отжигах в районе 350–550 К приводит к появлению сво-бодно мигрирующих вакансий и радиационно-ускоренным процессам упорядочения в сплавах Fe–Ni. При этом наблюдается две подстадии диссоциации вакансионных кластеров с энергиями диссоциации 1,2 и 1,5 эВ. При температурах около 800 К происходит гомогенизация твердого раствора. Показано, что эффективность дислокационных стоков больше чем эффективность деформационных вакансионных кластеров.

В настоящей работе рассмотрен механизм передачи деформаций от подрабатываемого грунтового массива, вызванных влиянием добычи полезных ископаемых, на конструктивные элементы армокаменных сооружений – кирпичных зданий. Рассматриваются различные мо-дели поведения кирпичной стены и грунтового основания, а также варианты их контактного взаимодействия. Определены предельные деформации грунта для заданных характеристик в моделях. Показано, что уровень деформаций и их рост в несущих элементах армокаменных сооружений существенным образом определяется выбором варианта взаимодействия конструктивных элементов в системе с грунтовым основанием. На основе рассмотренных моделей построены зависимости осредненной деформации в кирпичной стене перевязанного сечения для разных марок прочности от деформации грунтового основания.

Первопринципным методом изучена энергетика бейновского и орторомбического путей структурно-фазовых превращений при одноосной деформации переходного металла (ванадия). Уточнен орторомбический путь превращения с учетом его симметрии. В результате расчета фононного спектра в зависимости от деформации найдены наиболее мягкие ветви фононного спектра для бейновского пути, ответственные за потерю устойчивости структуры. Выявлен характер потери устойчивости, а также оценена величина деформации, при которой теряется устойчивость как при растяжении, так и при сжатии. Отмечены наиболее вероятные механизмы, определяющие устойчивость структуры и теоретическую прочность переходного металла V. Результаты могут относиться к ситуациям в эксперименте, когда деформируются малые, свободные от дефектов области, например, в наноструктурированных материа-лах при модифицировании поверхностных слоев пластическим деформированием, при нано-индентировании, при сверхвысокой пластичности сплавов на основе V.

Существует потребность применения в неразрушающем вихретоковом контроле микросхемных преобразователей Холла вместо индукционных катушек, традиционно используемых для преобразования параметров переменного магнитного поля в электрический сигнал. Преимуществом микросхемных сенсоров, наряду с технологичностью и дешевизной, являет-ся малая зависимость их эффективности от частоты воспринимаемого переменного поля (особенно в области малых частот). При малых рабочих частотах напряжение сигнала, наво-димое в приемных катушках вихретокового дефектоскопа, становится сравнимым с собственными шумами его приемного тракта, и для уверенного выделения этого сигнала приходится увеличивать число витков приемной катушки, что далеко не всегда приемлемо по причине жестких требований к ее габаритам. Такое преимущество преобразователей (сенсоров) Холла открывает перспективы существенного расширения области применения неразрушающего вихретокового контроля. Препятствием к этому могли бы явиться сравнительно большие собственные шумы таких сенсоров, наблюдаемые на нулевых рабочих частотах и составляющие несколько (а порой и десятки) микротесла (в единицах магнитной индукции).
В предлагаемом сообщении излагаются результаты измерения шумовых характеристик перспективных микросхемных холловских сенсоров магнитного поля марки 1SA-1M, производимых фирмой Sentron. Установлено, что собственные шумы обследованных сенсоров на частотах от 20 Гц до 10 кГц в десятки раз меньше наблюдаемых на нулевой частоте. Их размах не превышает десятых долей микротесла (в единицах индукции измеряемого пе-ременного магнитного поля), что открывает возможности для применения указанных сенсоров в вихретоковых дефектоскопах с малыми (десятки герц) рабочими частотами вместо индукционных катушек. Результатом может явиться расширение области применения неразрушающего вихретокового контроля. Полученные сведения могут быть полезны и при разработке средств измерения переменных магнитных полей безотносительно к вихретоковой дефектоскопии.

Настоящая работа посвящена исследованию влияния напряженно-деформированного состояния горячекатаного прутка из титанового сплава Ti–39Nb–7Zr на микроструктуру и свойства при ротационной ковке. Ротационная ковка рассматривается как перспективный метод интенсивной пластической деформации, обеспечивающий формирование ультрамелкозернистой структуры, равномерное распределение пластической деформации и улучшение свойств сплава.
Для определения напряженно-деформированного состояния разработана конечно-элементная модель, а именно: произведено полное воссоздание геометрии заготовки, определение материалов и их свойств, генерация сетки конечных элементов, настройка решателя модели и назначение граничных условий и нагрузок. Моделирование проводилось с использованием метода конечных элементов, что позволило учесть сложные трехмерные траектории движения инструментов и распределение деформаций в процессе РК. Механические свойства материала были определены экспериментально и использованы для построения модели упрочнения. При моделировании учитывалось поведение материала при нагреве перед деформацией на температуру 450 °C.
Результаты моделирования показали, что максимальные напряжения в прутке после ротационной ковки достигают 955 МПа в зоне контакта с инструментом. Анализ поперечно-го сечения образца выявил концентрические зоны с равномерным распределением напряже-ний и остаточные продольные сжимающие напряжения 0yy = 200 МПа. Продольное распре-деление напряжений демонстрирует высокие напряжения в зоне контакта ковочного инструмента и градиент напряжений от зоны контакта к периферии образца.
Исследование микроструктуры сплава после ротационной ковки показало наличие значительных пластических деформаций и высокую плотность дислокаций в поверхностной зоне. Микротвердость материала увеличилась до 350 HV в поверхностной зоне, по сравне-нию с 250 HV в центральной части образца. Ротационная ковка приводит к формированию текстуры и анизотропии механических свойств, что подтверждается измерениями модуля упругости, который варьируется от 70 до 90 ГПа по сечению прутка.
Цель работы заключалась в разработке многокомпонентной динамической 3D-модели для моделирования процессов ротационной ковки прутка из титанового сплава Ti–39Nb–7Zr с использованием программного пакета Ansys Mechanical. В качестве материала исследования использовался горячекатаный в β-области пруток из биосовместимого сплава Ti–39Nb–7Zr, произведенный на ПАО «Корпорация ВСМПО-АВИСМА».

В работе на примере малопластичного материала (сплав АК12) проведен анализ напряженно-деформированного состояния кольцевых образцов методами корреляции циф-ровых изображений и конечно-элементного моделирования при наиболее распространенных типах испытаний: на диаметральное сжатие и на растяжение на полукруглых опорах. Расчет-но-экспериментальным путем показано, что, независимо от типа испытания и стадии дефор-мирования, для различных типов и конфигураций испытаний в качестве предельного состоя-ния можно принять достижение критической локальной деформации, которая для рассмот-ренного материала составляет 4,0‒4,2 %. Проведено сравнение и анализ результатов, полу-ченных при различных типах испытаний, с точки зрения критериев остаточной диаметраль-ной деформации.

Для удовлетворения растущих потребностей эксплуатирующих организаций в надежной и бесперебойной транспортировке углеводородного сырья все чаще используются композитные трубы из полимерных материалов. Полимерно-армированные трубы, жесткие и гибкие, также используются во многих отраслях промышленности и предназначены для транспортировки подтоварной воды, нефти и газа, поскольку они устойчивы к коррозии и имеют меньший вес по сравнению с трубами из металла. Трубы из полимерных материалов с различными системами армирования обладают механическими свойствами, которые позволяют обеспечить гибкость, прочность, долговечность и экономическую выгоду в эксплуатации по сравнению с трубами из других материалов. В данной статье рассматривается моделирование при помощи лабораторных установок условий разрушения жестких и гибких полимерно-армированных труб при максимальном внутреннем давлении для оценки их работоспособности и прогнозирования ресурса в заданных условиях эксплуатации.

Методом возврата остаточного электросопротивления исследованы миграция радиационных дефектов и их взаимодействие с примесными атомами Si (0,2, 0,5 и 0,75 ат. %) и Au (0,13 ат. %) в облученных электронами сплавах Fe–16Cr в температурном интервале 80–180 К. Легирование сплавов примесями приводит к подавлению возврата остаточного электросопротивления, что указывает на захват мигрирующих дефектов на атомах примесей, который сопровождается уменьшением удельного вклада дефектов в остаточное электросопротивление. Захват мигрирующих дефектов на атомах примесей начинается выше 150 К в Fe–16Cr–0,13Au и Fe–16Cr-0,2Si и выше 130 К в Fe–16Cr–0,75Si. Плавное и монотонное подавление возврата остаточного электросопротивления при достаточно больших концентрациях примесей указывает на подавление коррелированной миграции в Fe–16Cr–0,13Au и Fe–16Cr–0,2Si, а также рекомбинации близких пар в Fe–16Cr–0,5Si и Fe–16Cr–0,75Si. Плавное подавление возврата остаточного электросопротивления и уменьшение удельного вклада дефектов при захвате указывают на ближнюю миграцию вакансий в температурном интервале 130–180 К. Выше 180 К начинается дальняя миграция дефектов.

Стареющие аустенитные стали характеризуются наличием сложной микроструктуры и различных дефектов и преципитатов, в значительной степени определяющих свойства сталей. Формирование и эволюция системы дефектов в этих материалах сопровождаются измене-ниями в спектрах брэгговского и диффузного рассеяния нейтронов, что делает нейтронно-дифракционные методы эффективным средством их изучения. В данной работе мы выполнили анализ результатов наших нейтронографических экспериментов по исследованию изменений кристаллической структуры и системы карбидных преципитатов в марганцевой аустенитной стали 40Х4Г18Ф2, развивающихся при термическом старении материала и облучении его потоками быстрых нейтронов. Выявлены отличия, которые возникают при таких способах воздействия. Результаты анализа хорошо согласуются с электронно-микроскопическими данными, дополняя их в части исследования облученных образцов.

Магнитострикционные металлоорганические композиты – важный класс материалов для различных электротехнических приложений. Сплав Fe–Ga – один из основных материалов, используемых в основе таких композитов. В качестве органической матрицы обычно используется эпоксидная смола. Проблемой таких композитов является крайне низкая температурная стабильность свойств из-за размягчения смолы при повышенных температурах. В данной работе впервые предложено использовать для создания композитов широко рас-пространенное органическое соединение на основе фенолформальдегидной смолы – бакелит. Методом холодного прессования при различном давлении были изготовлены композиты на основе порошка Fe–Ga с добавлением 5 масс. % бакелита. Кроме того, реализовано исследование по влиянию отжига порошка после размола в шаровой мельнице на структуру и свойства композитов. Показано, что композит, изготовленный при тех же параметрах из отожженного порошка, обладает существенно более высокой магнитострикцией.
Статистика статьи
Статистика просмотров за 2025 год.
Издательство
- Издательство
- ИМАШ УрО РАН
- Регион
- Россия, Екатеринбург
- Почтовый адрес
- 620049 г. Екатеринбург, ул.Комсомольская, 34
- Юр. адрес
- 620049 г. Екатеринбург, ул.Комсомольская, 34
- ФИО
- Швейкин Владимир Павлович (Директор)
- E-mail адрес
- ges@imach.uran.ru
- Контактный телефон
- +7 (343) 3744725